Automata
What are automata? Why do they exist? What do they do?
First, there are two major parts of automata: The cams, and the cranks.
Cams are essentially shaped wheels that rotate and can be connected to other cams, allowing for the transferal of motion. They are shaped in various ways, as such:
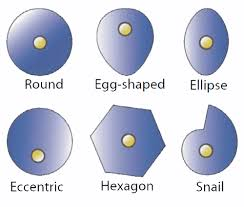
Round: Smooth rotary motion
Ellipse: Sudden, yet smooth up and down motion
Egg-shaped: Starting off as round motion, but switching to elliptical/eccentrc before moving back to round motion.
Eccentric: Consistent smooth up and down motion
Hexagon: Sharp up and down motion
Snail: Combines the round and hexagon types together.
Cranks:
Cranks are shafts connected to cams. They typically serve two purposes: The first is to connect outside of the system to a handle, which can be rotated by a motor or other power source to power the system. The second is to transfer motion throughout the system, sometimes up and down, sometimes rotary.
Here are some Automata that give perspective onto how these work:



Comments
Post a Comment